ကျွန်ုပ်တို့၏ ဝက်ဘ်ဆိုက်များသို့ ကြိုဆိုပါတယ်။
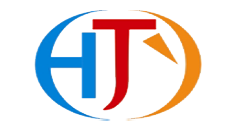







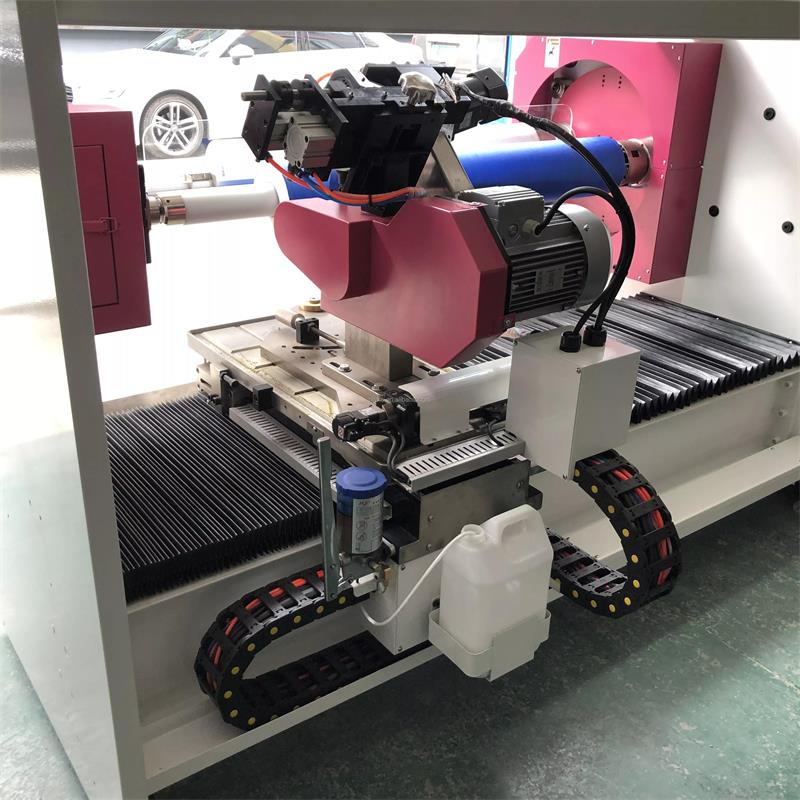
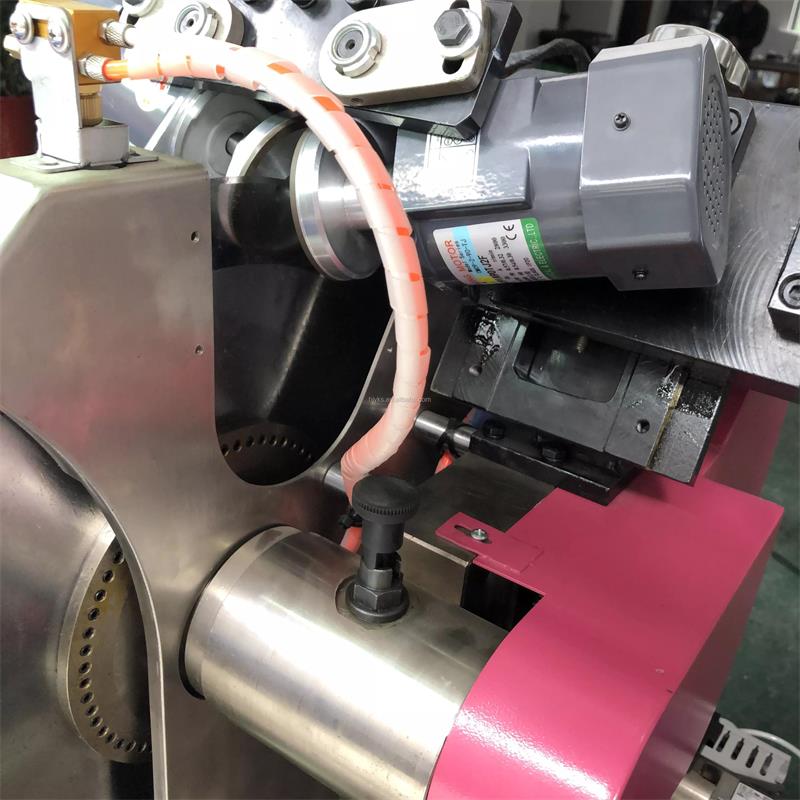
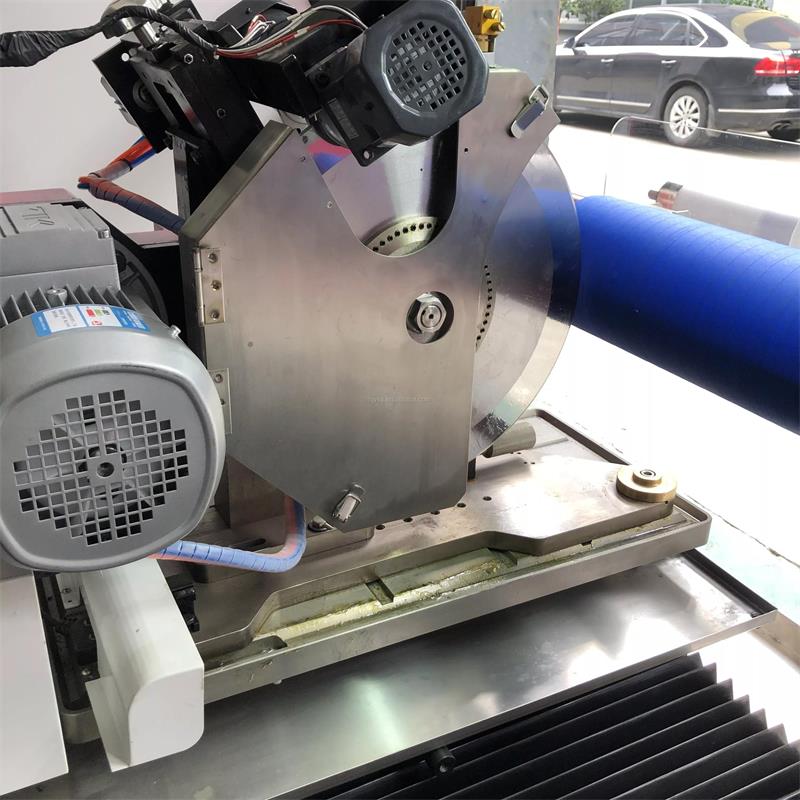
HJY-QJ01A နှစ်ထပ်ရိုးတံလိပ်ပြောင်းလဲခြင်း အလိုအလျောက်တိပ်ဖြတ်စက်
သင့်စာကို ဤနေရာတွင် ရေးပြီး ကျွန်ုပ်တို့ထံ ပေးပို့ပါ။
ထုတ်ကုန် အမျိုးအစားများ
-

HJY-FQ09A လေးရိုးဖ် ဆေးဘက်ဆိုင်ရာ တိပ်ဖြတ်တောက်ခြင်း ပြန်လည်...
-

HJY-FJ02 နှစ်ထပ်ရိုးတံများ ပြန်ရစ်စက်
-

HJY-QJ08 ရှစ်ရိုးတံ တိပ်ဖြတ်စက်
-

HJY-FJ03 အသေးစား Core မျက်နှာပြင်ပြန်ရစ်စက်တိပ်ပြန်ရစ်...
-

FQ08 အလိုအလျောက် နှစ်ထပ်ရိုးတံ ဖြတ်တောက်ခြင်း ပြန်ရစ်စက်...
-

PE ဖလင် အပူမီးဖိုဥမင်လိုဏ်ခေါင်း အပူ Bopp တိပ် shri...